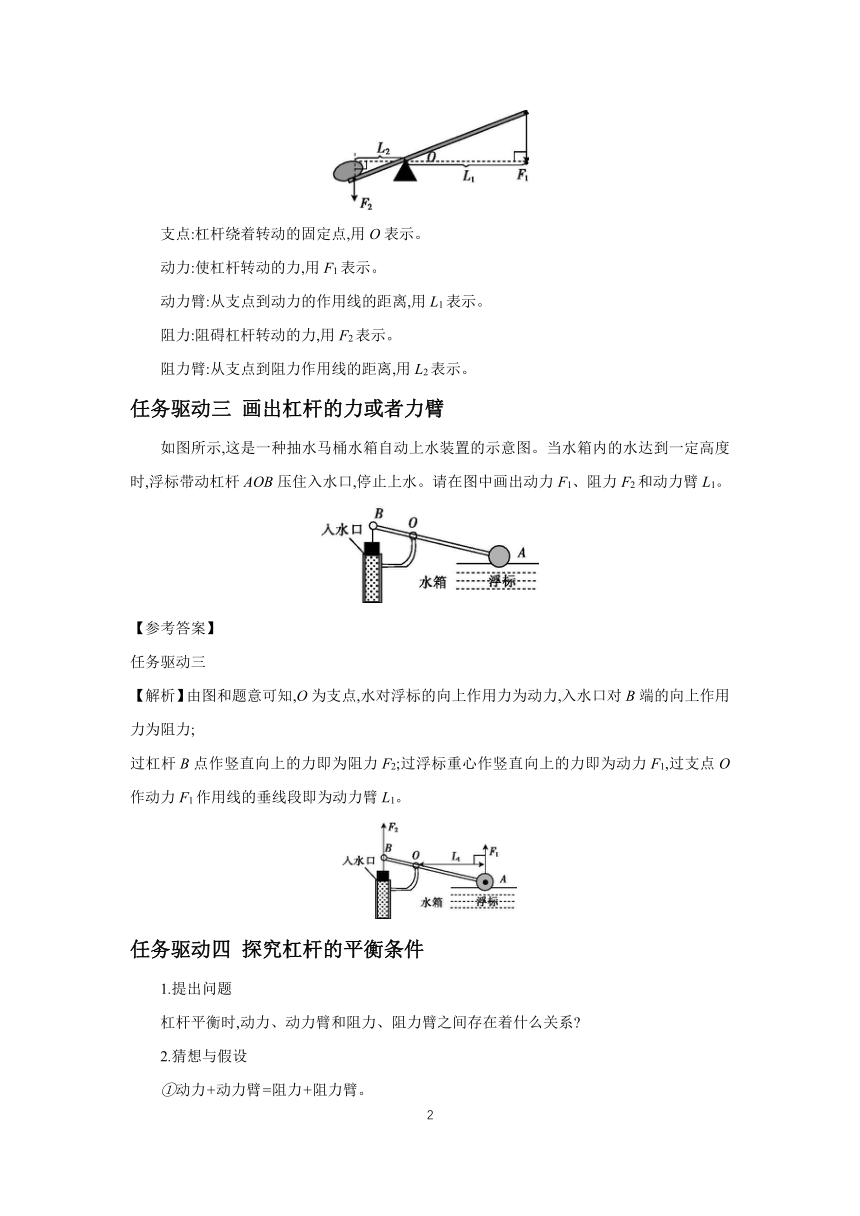
資源簡介 10.1 第1課時 認識杠桿 杠桿的平衡素養目標1.知道什么是杠桿,能根據實物畫出杠桿的示意圖。2.通過科學探究,能對杠桿平衡條件進行猜想與假設,并設計出驗證方案,對獲得的信息進行處理,得出杠桿平衡的條件。◎重點:杠桿概念的建立;杠桿平衡條件的探究。【合作探究】生活中的物理蹺蹺板可是我們小時候的最愛了,幼兒園里每天都有和同學們一起玩這款游戲的記憶。為什么兩個同學坐上去后,一會兒左邊翹起來,一會兒右邊翹起來,有時候兩個人還會懸在半空中笑嘻嘻地一動不動呢 【問題】小朋友是如何控制蹺蹺板左右翹起的呢 任務驅動一 認識杠桿杠桿特點 (1)都是一根“硬棒”;(2)使用時它們都在力的作用下繞固定點轉動結論 在物理學中,這種在 的作用下能繞著 轉動的 就稱為杠桿 【參考答案】任務驅動一力 固定點 硬棒任務驅動二 認識杠桿的五要素 支點:杠桿繞著轉動的固定點,用O表示。動力:使杠桿轉動的力,用F1表示。動力臂:從支點到動力的作用線的距離,用L1表示。阻力:阻礙杠桿轉動的力,用F2表示。阻力臂:從支點到阻力作用線的距離,用L2表示。任務驅動三 畫出杠桿的力或者力臂如圖所示,這是一種抽水馬桶水箱自動上水裝置的示意圖。當水箱內的水達到一定高度時,浮標帶動杠桿AOB壓住入水口,停止上水。請在圖中畫出動力F1、阻力F2和動力臂L1。【參考答案】任務驅動三【解析】由圖和題意可知,O為支點,水對浮標的向上作用力為動力,入水口對B端的向上作用力為阻力;過杠桿B點作豎直向上的力即為阻力F2;過浮標重心作豎直向上的力即為動力F1,過支點O作動力F1作用線的垂線段即為動力臂L1。任務驅動四 探究杠桿的平衡條件1.提出問題杠桿平衡時,動力、動力臂和阻力、阻力臂之間存在著什么關系 2.猜想與假設①動力+動力臂=阻力+阻力臂。②動力-動力臂=阻力-阻力臂。③=。④動力×動力作用點到支點的距離=阻力×阻力作用點到支點的距離。⑤動力×動力臂=阻力×阻力臂。·學習小助手·改變動力可以通過改變鉤碼的格數實現,改變動力臂可以通過改變鉤碼的位置實現,改變阻力可以通過改變彈簧測力計的拉力實現,改變阻力臂可以通過改變彈簧測力計的位置實現。 3.實驗器材及裝置 支架(或鐵架臺)、彈簧測力計、相同質量的鉤碼數個、帶刻度的杠桿、細線若干,其他常規器具自備(如筆等)。4.設計實驗如圖所示,在杠桿支點的一側掛鉤碼,在支點另一側用手通過彈簧測力計拉住杠桿,研究在什么條件下杠桿能夠平衡。設彈簧測力計對杠桿的拉力為動力,鉤碼對杠桿的拉力為阻力。 5.進行實驗與收集證據(1)安裝好杠桿,調節杠桿兩端的平衡螺母,使杠桿在水平位置平衡;(2)在支點左邊某刻度(如20 cm)處掛幾個鉤碼,在支點右邊某刻度(如15 cm)處用彈簧測力計沿豎直方向拉住杠桿,使杠桿在水平位置平衡,讀出彈簧測力計的示數,并將這一步的實驗數據記錄到表格中;(3)改變力和力臂重復操作a.鉤碼和彈簧測力計的位置保持不變,改變鉤碼的數量,讀出彈簧測力計的示數,并記錄;b.鉤碼的數量和位置保持不變,改變彈簧測力計的位置,讀出彈簧測力計的示數,并記錄;c.鉤碼的數量和彈簧測力計的位置不變,改變鉤碼的位置,讀出彈簧測力計的示數,并記錄數據。次數 F1/N L1/m F2/N L2/m1234 6.分析實驗數據并得出結論對上表中記錄的實驗數據進行分析處理,同上面的猜想與假設對照,可以發現在誤差允許的范圍內,每次實驗中動力與動力臂的乘積都 阻力與阻力臂的乘積。得出杠桿的平衡條件為 ,用字母表示為 。 7.交流與討論1.杠桿的平衡是指杠桿處于什么狀態 2.實驗前,為什么要將杠桿調至水平位置平衡 3.實驗過程中,為什么還要讓杠桿在水平位置平衡 4.你現在能回答小朋友是如何控制蹺蹺板左右翹起的問題了嗎 【參考答案】任務驅動四6.等于 動力×動力臂=阻力×阻力臂 F1L1=F2L27.1.杠桿靜止或勻速轉動。我們選擇杠桿靜止狀態作為平衡狀態,是為了讓操作更加簡單。2.使杠桿自身的重心調到支點上,這樣杠桿重力與其力臂乘積為零,就避免了杠桿自身的重力對杠桿平衡的影響。3.直杠桿在水平位置平衡,量得支點到鉤碼的距離就是力臂,從杠桿上的刻度值直接讀出。杠桿如果不水平,則支點到鉤碼的距離就不是力臂,所以這樣便于在杠桿上直接讀出力臂的大小。4.原來蹺蹺板相當于杠桿,杠桿的動力和阻力分別是小孩對蹺蹺板的壓力(大小等于重力),根據杠桿的平衡條件可知要實現蹺蹺板的平衡F1L1=F2L2,質量大的小朋友要離支點近一些,且可以通過調節對蹺蹺板壓力的力臂來打破杠桿的平衡使杠桿轉動。2 展開更多...... 收起↑ 資源預覽 縮略圖、資源來源于二一教育資源庫
 資源預覽
資源預覽

 資源預覽
資源預覽